ホーム / バックホウ姿勢情報表示システム
見えない現場を“見える化”する技術
災害現場や危険区域、水中作業など、人が近づくことができない環境での作業では、建設機械を遠隔操作する必要があります。
しかし、遠隔操作には大きな課題があります。それは 機械の姿勢や状態が見えなくなること。
ヒロコンでは、熊谷組様と共同でバックホウの姿勢をリアルタイムで可視化する「バックホウ姿勢情報表示システム」を開発しました。
この技術により、遠隔操作でも安全で正確な作業を可能にしています。
ヒロコンは、バックホウに取り付けたセンサーと姿勢表示アプリケーションを組み合わせた
バックホウ姿勢情報表示システム
を開発しました。
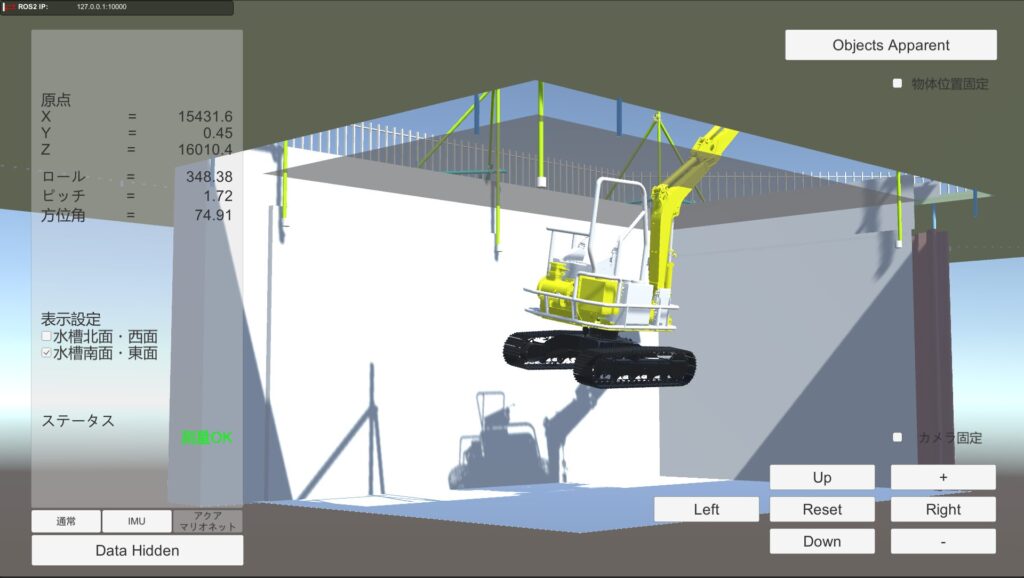
さらにこの技術は、水中作業向けバックホウ遠隔操作システム「アクアマリオネット」とも連携しています。
主な開発内容
など、システム全体の設計・開発を担当しています。
遠隔操作による建設作業では、オペレーターが現場の機械を直接見ることができません。
そのため次のようなリスクがあります。
こうした課題を解決するため、バックホウの姿勢をリアルタイムで可視化する技術が求められていました。
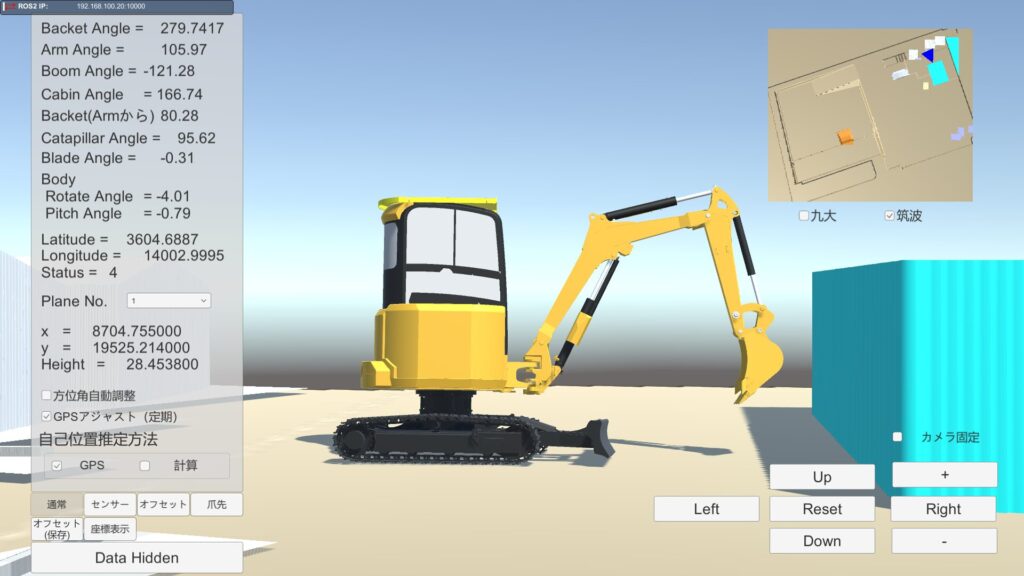
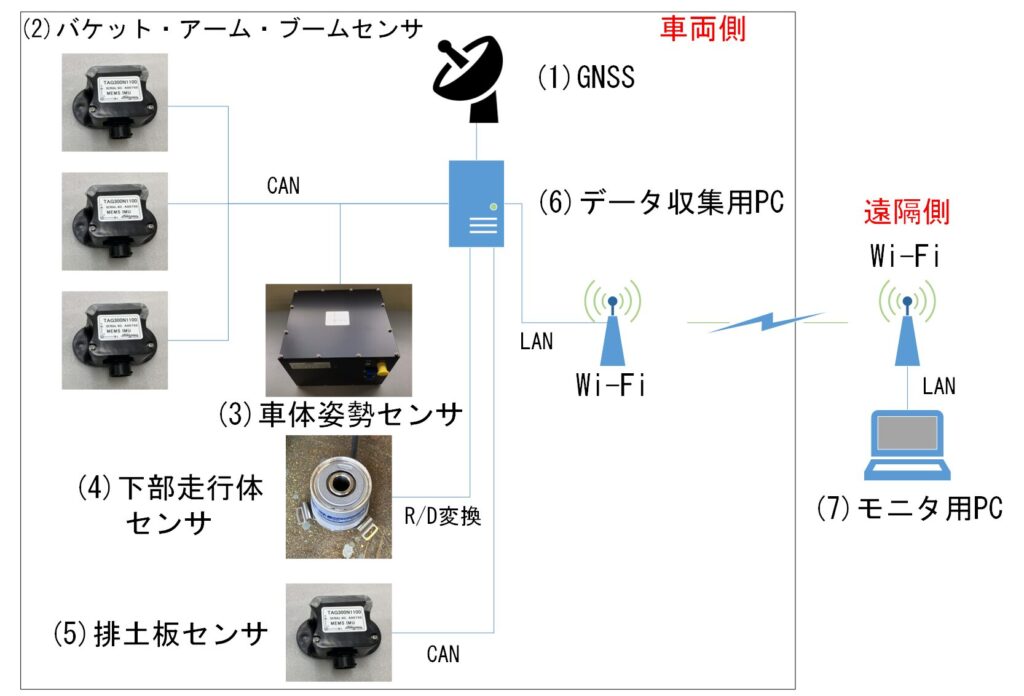
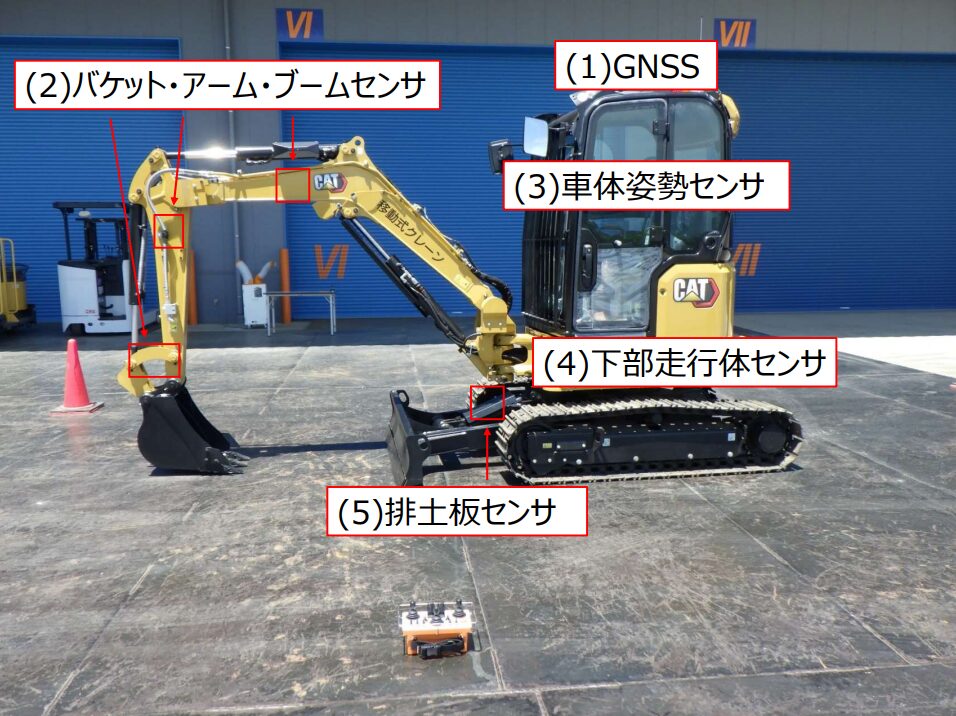
このシステムでは、バックホウに搭載した複数のセンサーからリアルタイムにデータを取得します。
取得したデータは
を通して処理され、3D空間上でバックホウの姿勢を表示します。
さらに、地形データを事前に読み込むことで実際の現場に近い状態で機械の動きを確認することが可能です。
ヒロコンは、このシステムの中核となるデータ処理・アプリケーション開発を担当しています。
データ通信には
ROS2(Robot Operating System 2)
を使用しています。
ROS2を利用することで
といった柔軟なシステムを実現しています。
このプロジェクトでは、複数の先端技術を組み合わせています。
これらを統合することで遠隔操作でも安全に作業できる環境を実現しました。
このシステムは、さまざまな建設機械に応用されています。
建設機械の自動化・遠隔化に向けて技術の進化を続けています。